-
![[image]](https://www.balancer.ru/cache/sites/exn.ca/news/Images/128x128-crop/19990202-marsflyer1big.jpg)
Марсианская авиация!
Теги:
 Alek
Alek

Alek
опытный

Компания Aurora Flight Sciences сообщила об успешном проведении испытания прототипа беспилотного летательного аппарата MarsFlyer. Он разрабатывается компанией совместно с NASA и рядом научных организаций.
http://exn.ca/news/Images/19990202-marsflyer1big.jpg [zero size or time out]
Ну не понимаю я! Как он там летать то будет? Атмосферы же нет почти совсем ")
")
 инфо
инфо инструменты
инструменты
низенько-низенько
На маневр разворота ушел весь запас высоты, и теперь наш розовокрылый аэр низко летел над западным склоном Фарсиды. Даже слишком низко, пожалуй. По причине сильной разреженности атмосферы Марса здешние авиаторы - изумительные мастера бреющего полета. Кубакин - мастер из мастеров. Он же постоянный лидер соревнований по экономии
полетного энергоресурса. Чем ниже - тем экономичнее полет наших птиц.
Я стал смотреть на быстро мелькающие под носовой частью блистера верхушки скалистых бугров. Черные базальтовые глыбы, полузасыпанные песками цвета ржавчины и глинистой пылью цвета битого кирпича. Экономя энергоресурс, Кубакин, похоже, готов был вспороть базальты Фарсиды опорными лыжами: перед носом аэра на неровностях склона уже трепетала, словно добыча в когтях у орла, крылатая тень.
Пружинно вздрогнув, машина качнулась с крыла на крыло. Кабина дернулась и резко накренилась вправо, а слева по борту - под самым изгибом крыла - иззубренным лезвием промелькнул гребень стены обрыва.
Вот как надо летать Кто знает, откуда? )
На маневр разворота ушел весь запас высоты, и теперь наш розовокрылый аэр низко летел над западным склоном Фарсиды. Даже слишком низко, пожалуй. По причине сильной разреженности атмосферы Марса здешние авиаторы - изумительные мастера бреющего полета. Кубакин - мастер из мастеров. Он же постоянный лидер соревнований по экономии
полетного энергоресурса. Чем ниже - тем экономичнее полет наших птиц.
Я стал смотреть на быстро мелькающие под носовой частью блистера верхушки скалистых бугров. Черные базальтовые глыбы, полузасыпанные песками цвета ржавчины и глинистой пылью цвета битого кирпича. Экономя энергоресурс, Кубакин, похоже, готов был вспороть базальты Фарсиды опорными лыжами: перед носом аэра на неровностях склона уже трепетала, словно добыча в когтях у орла, крылатая тень.
Пружинно вздрогнув, машина качнулась с крыла на крыло. Кабина дернулась и резко накренилась вправо, а слева по борту - под самым изгибом крыла - иззубренным лезвием промелькнул гребень стены обрыва.
Вот как надо летать
Кто знает, откуда? )

Alek>
Давление марсианской атмосферы у поверхности планеты примерно как у земной на высоте 35 км. Но! Притяжение Марса, а, значит и вес самолета, равны 0.4 от земных значений. Молекулярная масса двуокиси углерода в полтора раза больше, чем средняя величина этого параметра для воздуха, а зимой и температура атмосферы заметно ниже. Все это увеличивает ее плотность и работает на увеличение подъемной силы. Кроме того, очевидно, выбирается малая нагрузка на крыло.
Ну не понимаю я! Как он там летать то будет? Атмосферы же нет почти совсем
Давление марсианской атмосферы у поверхности планеты примерно как у земной на высоте 35 км. Но! Притяжение Марса, а, значит и вес самолета, равны 0.4 от земных значений. Молекулярная масса двуокиси углерода в полтора раза больше, чем средняя величина этого параметра для воздуха, а зимой и температура атмосферы заметно ниже. Все это увеличивает ее плотность и работает на увеличение подъемной силы. Кроме того, очевидно, выбирается малая нагрузка на крыло.

Адрон
втянувшийся
Alek>Компания Aurora Flight Sciences сообщила об успешном проведении испытания прототипа беспилотного летательного аппарата MarsFlyer. Он разрабатывается компанией совместно с NASA и рядом научных организаций
Думаю, что если бы не продули в аэродинамической трубе с CO2 при 10 мБ - не сказали бы об "успешном испытании".
Думаю, что если бы не продули в аэродинамической трубе с CO2 при 10 мБ - не сказали бы об "успешном испытании".
Alek
опытный
hcube>Вот как надо летать Кто знает, откуда? )
Я читал этот рассказ, там нефть на марсе нашли, красного цвета! Но как называется не помню. И кто написал не помню. Может Павлов или Снегов?
Кто знает, откуда? )Я читал этот рассказ, там нефть на марсе нашли, красного цвета!
Но как называется не помню. И кто написал не помню. Может Павлов или Снегов?
Alek
опытный
Адрон>Думаю, что если бы не продули в аэродинамической трубе с CO2 при 10 мБ - не сказали бы об "успешном испытании".
Про трубу ничего не сообщалось вроде. А исытали так - сбросили с аэростата в свободный полет. Причем в сложеном состоянии и он на лету развернулся и запарил как горный орел") без мотора!
без мотора!
Про трубу ничего не сообщалось вроде. А исытали так - сбросили с аэростата в свободный полет. Причем в сложеном состоянии и он на лету развернулся и запарил как горный орел
") без мотора!
без мотора!

В принципе, более-менее реалистично. С учётом существующих, а тем паче перспективных композитов и других суперматериалов конструкция может получиться лёгонькой, так и что и марсианских плотностей хватит. Интересно только, какой движок они на него поставят, и как долго он с ним сможет пролетать? И как он сможет выдерживать возмущение марсианской атмосферы, если собирается долго прожить?:)
P.S. Кстати, встречаются проекты и венерианских самолётов, с солнечным питанием.
P.P.S. А цитата из Павлова, "Амазония, ярданг Восточный":)
P.S. Кстати, встречаются проекты и венерианских самолётов, с солнечным питанием.
P.P.S. А цитата из Павлова, "Амазония, ярданг Восточный":)
 avmich
avmich
Слушал недавно НАСАвских специалистов, работающих по теме. Рассказывали, проектируешь самолёт для Марса - и всё время пропеллер таким здоровым выходит... что непонятно, где крылья. Поэтому идея есть - сделать махолёт...
Alek
опытный
Fakir>Интересно только, какой движок они на него поставят, и как долго он с ним сможет пролетать?
Предпологается использовать реактивный двигатель на годрозине. Основное время он должен парить как планер и только иногда включать движок для набора высоты.
Предпологается использовать реактивный двигатель на годрозине. Основное время он должен парить как планер и только иногда включать движок для набора высоты.
Alek
опытный
Fakir>P.S. Кстати, встречаются проекты и венерианских самолётов, с солнечным питанием.
Для венеры в основном предлогаются аэростаты
Fakir>P.P.S. А цитата из Павлова, "Амазония, ярданг Восточный":)
Точно, точно.... Я знал, знал.... Но... склероз
Для венеры в основном предлогаются аэростаты
Fakir>P.P.S. А цитата из Павлова, "Амазония, ярданг Восточный":)
Точно, точно.... Я знал, знал.... Но... склероз

А я слышал про винт, с гидразиновыми движками на концах лопастей.
Аэростаты для Венеры - это классика. Но самолёты имеют некоторые преимущества - управляемость хотя бы, с помощью одного самолёта, надо полагать, картину атмосферных течений на Венере можно изучить намного лучше, чем одним аэростатом. А наиболее продуктивной, наверное, была бы система из одновременно работающих двух-трёх баллонов и одной птички.
>>Слушал недавно НАСАвских специалистов, работающих по теме. Рассказывали, проектируешь самолёт для Марса - и всё время пропеллер таким здоровым выходит... что непонятно, где крылья. Поэтому идея есть - сделать махолёт...
Махолёт - это, конечно, здорово, только пусть его для начала хоть на Земле сделают:)
Махолёт - это, конечно, здорово, только пусть его для начала хоть на Земле сделают:)
 Fakir
Fakir
Ну чо - дожили вроде. Ну, почти.

В сложенном виде



Ingenuity — Википедия
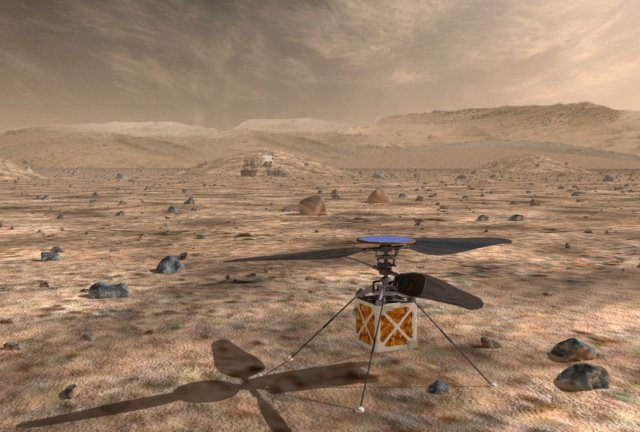
Ingenuity (американское произношение: [ɪndʒəˈnuːəti], в переводе — «Изобретательность»; ранее был известен под названием Mars Helicopter Scout, в переводе — «Марсианский вертолёт-разведчик») — роботизированный беспилотный летательный аппарат-разведчик вертолётного типа, который должен будет исследовать возможные цели на поверхности Марса для последующих передвижений марсохода «Персеверанс» (англ. Perseverance, «Настойчивость») в рамках миссии «Марс-2020». Первый летательный аппарат Земли, предназначенный для активных полётов в атмосфере другого небесного тела. // Дальше — ru.wikipedia.orgIngenuity — роботизированный беспилотный летательный аппарат-разведчик вертолётного типа, который должен будет исследовать возможные цели на поверхности Марса для последующих передвижений марсохода «Персеверанс». Первый летательный аппарат Земли, предназначенный для активных полётов в атмосфере другого небесного тела.
Маленький вертолёт будет использован для тестирования и демонстрации технологии полётов на Марсе. По результатам тестирования НАСА оценит перспективность технологии. Летательный аппарат должен будет обеспечить разведку местности для марсохода.
Ingenuity будет использовать вращающиеся в противоположных направлениях соосные винты диаметром более 1 метра.
Масса 1,8 кг[5]
Диаметр соосных винтов 1,2 м[6]
Высота 0,8 м[6]
Скорость вращения винта 2400 оборотов в минуту[7] (<0,7 Маха)
Мощность 220 Вт (зарядка от солнечных батарей)
План миссии Совершить от 1 до 5 полётов за 30 солов работы
Первый полет ожидается между 60 и 90 солом после посадки (19 апреля—19 мая 2021 года)[8]
Продолжительность одного полета 90 секунд
Диапазон действия 300 м
Максимальная высота 10 м
Максимальная скорость Горизонтальная: 10 м/с
Вертикальная: 3 м/с
Ёмкость батареи 35—40 Вт⋅ч (130—140 кДж)
В сложенном виде


NASA Chooses Helicopter for Mars Drone – UAS VISION
NASA is now planning on using a UAV in addition to the Rover in order to explore Mars. The reasons are very simple, and parallel the desire to use UAV’s on earth. Having a camera in the air, instead of being stuck on the ground, allows for better perspective to see details of the terrain. And also, avoids the problem that rovers have with negotiating difficult terrain. But what is particularly interesting with this story, is that they have decided to use a coaxial helicopter instead of a quadcopter. Why? // Дальше — www.uasvision.com
But what is particularly interesting with this story, is that they have decided to use a coaxial helicopter instead of a quadcopter. Why? Multirotors on earth, already have enough trouble with stabilization due to the need to accelerate and decelerate the propellers to control their flight. While small quadcopters do fly very well, as they get bigger, and the rotors get bigger, stabilization gets harder. This is because the rotor inertia increases exponentially with diameter. It takes much more energy to change the speed of a large rotor than it does smaller ones. This is why you do not see very large multirotors flying very dynamically.
On Mars, the problem is even worse. Due to the thin atmosphere, the rotor must be very large to be able to generate enough lift to fly. It would require a very large and heavy rotor to achieve lift, and the power required to change their speed quickly enough for flight control, would be much too large and heavy to fly.
Helicopters do not have this problem, because they use a swash plate to actuate variable pitch on each blade for flight control. The motors do not need to be large enough to accelerate the rotors quickly for roll and pitch control. So you can have a tiny motor spinning a large rotor in the thin Martian atmosphere.




Я в теме по новому марсоходу Персеверанс выкладываю понемногу. Может туда перенести? Сегодня вот выложили видео, точнее несколько фото, как вертолетик разворачивается.



Fakir>> Ну чо - дожили вроде.
Полл> Дополню фото с Марса подготовки к отцеплению от марсохода.
Полл> https://www.youtube.com/watch?v=iLaPXd6T2ag
Вчера Ingenuity совершил 13 полет на Марсе.

Полл> Дополню фото с Марса подготовки к отцеплению от марсохода.
Полл> https://www.youtube.com/watch?v=iLaPXd6T2ag
Вчера Ingenuity совершил 13 полет на Марсе.
Lucky 13 – Ingenuity to Get Lower for More Detailed Images During Next Flight
Ingenuity’s next flight will be at a lower altitude and focus on one interesting ridgeline of rock outcrops in the “South Séítah” region. // mars.nasa.gov
Полл> Вчера Ingenuity совершил 13 полет на Марсе.
Есть 14 полет, несмотря на изменение сезона на Марсе и начавшееся из-за этого изменение плотности атмосферы:
Есть 14 полет, несмотря на изменение сезона на Марсе и начавшееся из-за этого изменение плотности атмосферы:

Увы, но Ingenuity отлетался - зацепили лопастью поверхность.

Первоначально созданный лишь для демонстрации технологии полёта на Марсе, так его основная миссия насчитывала 5 экспериментальных полётов в течение 30 дней, первый вертолёт на другой планете смог в итоге выполнить 72 полёта (более чем в 14 раз больше запланированных!) и проработал почти 3 года (более чем в 33 раза дольше, чем планировалось!). Он пролетел в общей сложности 17 км, совершил взлёты из 48 локаций и провёл в марсианском небе 128 минут, достигнув максимальной высоты полёта 24 метра и скорости в 36 км/ч.

Ну, история Ingenuity завершена - марсоход поехал дальше, оставив его вне зоны связи.
но не окончательно...
но не окончательно...
Согласно заложенным алгоритмам, вертолёт продолжит сбор данных и после прекращения связи с марсоходом. Вертолёт будет ежедневно просыпаться, активировать свой компьютер и проверять работу солнечной панели, аккумуляторной батареи и электронного оборудования. Он также будет фотографировать поверхность планеты своей камерой и собирать данные о температуре с датчиков, размещённых по всему аппарату. При этом вся собранная информация останется на его борту. Команда подсчитала, что в таком режиме память вертолёта потенциально может сохранить данные за 20 лет. Когда же человечество снова посетит район последней посадки вертолёта, оно попытается получить доступ к этому архиву уникальных данных.
 Fakir
Fakir
Copyright © Balancer 1997..2025
Создано 12.12.2002
Связь с владельцами и администрацией сайта: anonisimov@gmail.com, rwasp1957@yandex.ru и admin@balancer.ru.
Создано 12.12.2002
Связь с владельцами и администрацией сайта: anonisimov@gmail.com, rwasp1957@yandex.ru и admin@balancer.ru.

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}